

A Programmable IK Robot Arm
An IK robot arm capable to grab stuffs made from scratch
Group Project
|
01.2018 - 03.2018
Project Brief
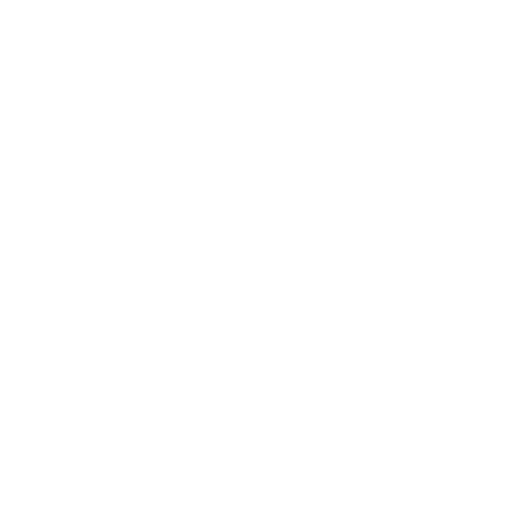
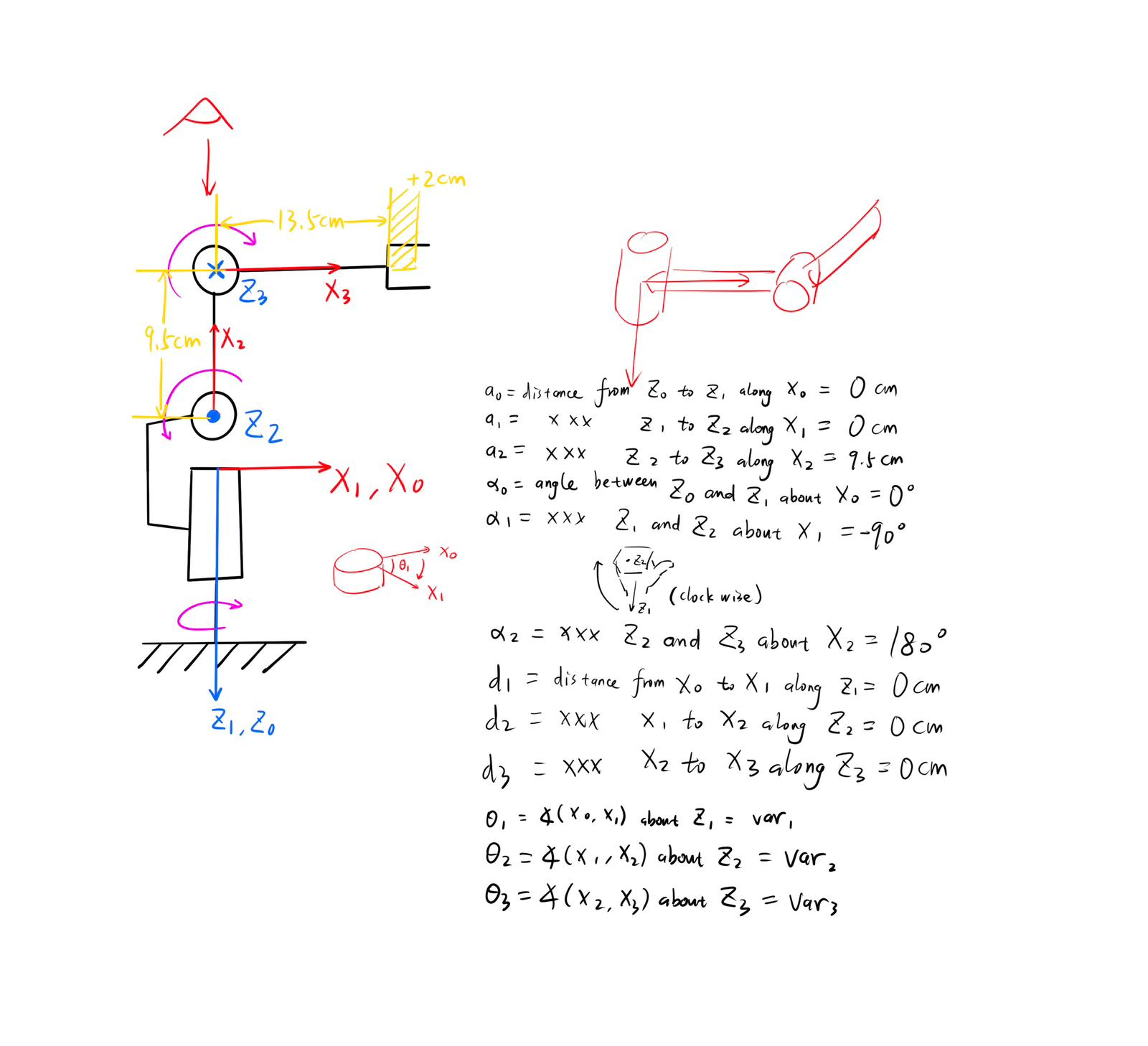
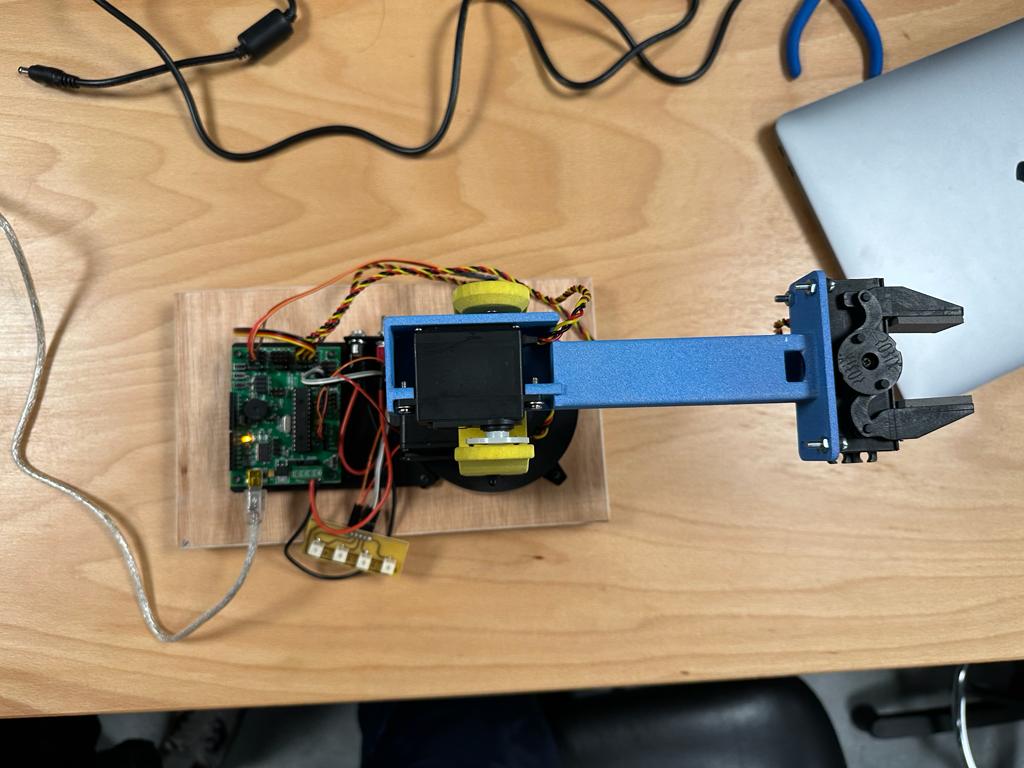
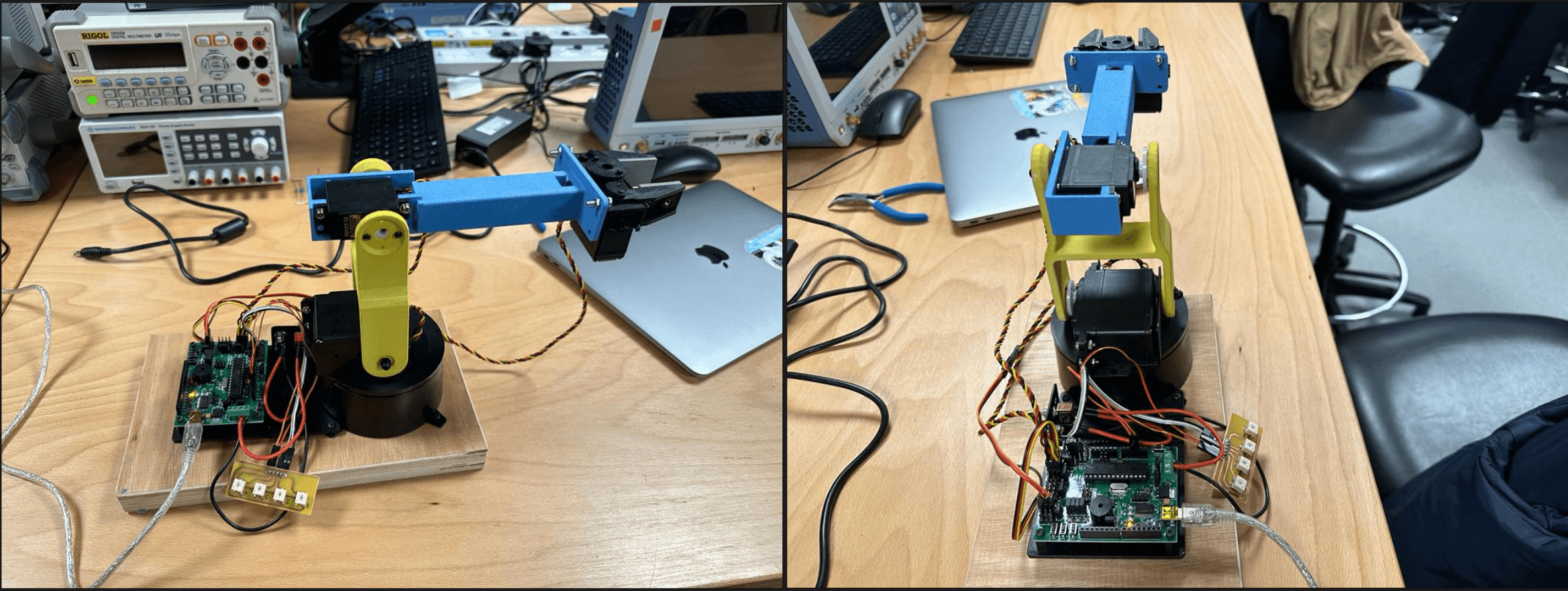
In this project, we assembled a 3-DOF(degree of freedom) robot arm with a gripper using the Arduino and relevant actuators. We analyzed the joint connections and angles, calculated the kinematics structure and programmed it to perform forward and inversed kinematics, eventually enabling it to reach to any set coordinate with a cubic polynomial trajectory.
Project Info
Context: Group Project for Robotics Program
Category: Robotics Design
Tools Used: Arduino
Project Supervisors:
Prof. Chow, Lai
Collaborators: Weiyi Zhang(ME), Alvin Huang, Filipp Kondrashov, Gloria Pensabene
My Role: Geometric Calculation, Arduino Programming
——— Project Development ———
Process
The project involved procedures starting with assembling a robot arm with the Arduino, measuring the proximity parameter of the robot arm and calculate relevant coordinates, angles and matrices required for kinematics calculations. Eventually, a series of MATLAB code was wrote to drive the robot arm's motion and perform grippings.
In the group, I led the math calculations of the forward and inversed kinematics parameters of the assembled robot arm, and did the implementation of the MATLAB code for arm joint angle calculations for the forward kinematics implementation. I also participated in the calculation and the coding of the trajectory plannings.
Outcome
Eventually the robot arm was successfully built and coded to perform the reaching-picking-releasing process seamlessly. The final code implementation made the robot arm able to reach anywhere by inputing a coordinate within its working space via inversed kinematics mechanism. When programming a trajectory plan with a picking operation, it will automatically follow the trajectory with cubic polynomial path to ensure smooth and steady motion.
